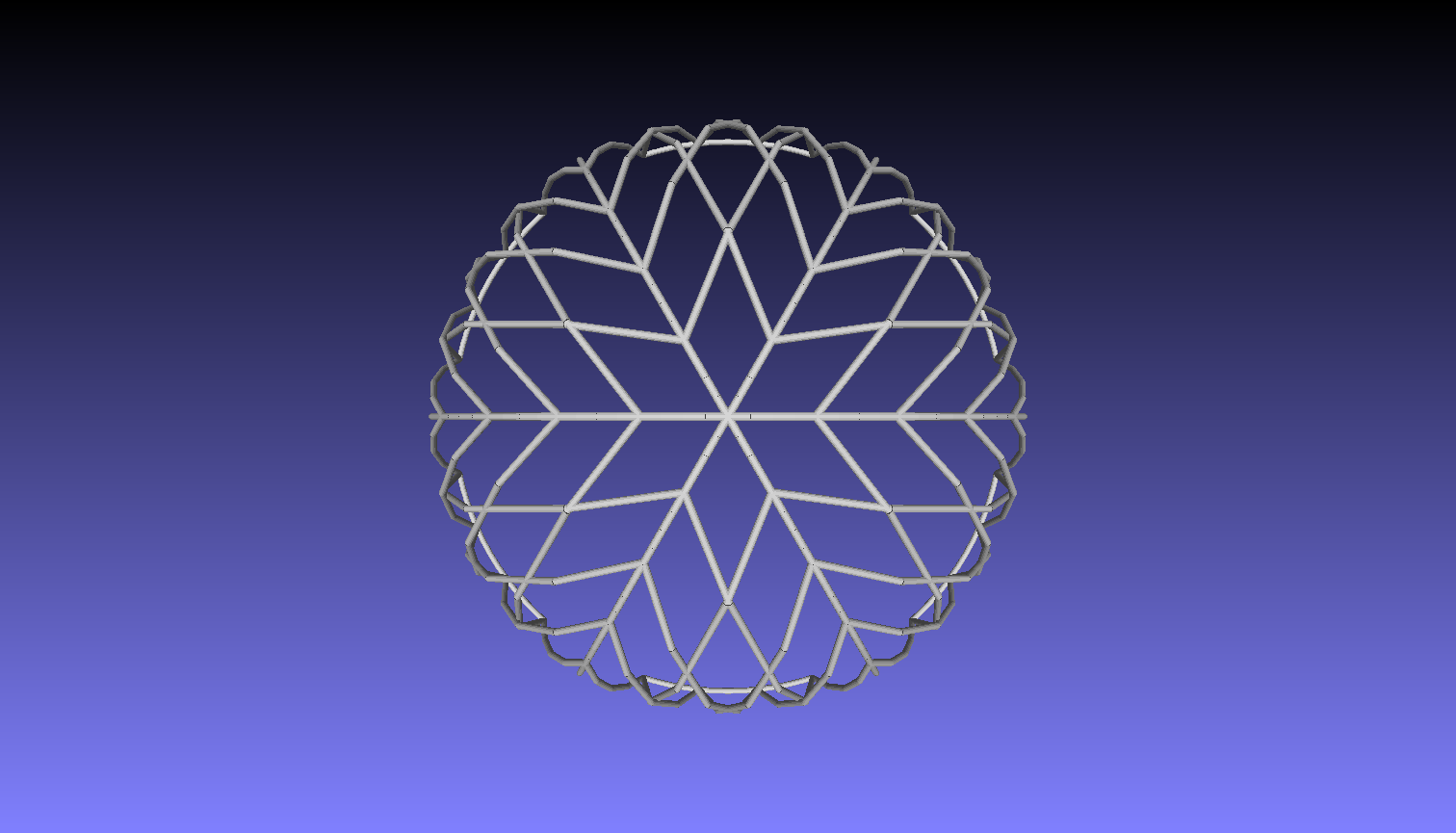
Ova kupola je sferni segment (dome) sa površinom podeljenom u niz rombodnih (rombastičnih) ploha koje prate zakrivljenost sfere.
- Osnovna ideja je da se površina kupole deli na sektore (npr. šest sektora po 60°),
- Svaki sektor je podeljen radijalnim i kružnim linijama koje prave mrežu romboida,
- Svaki romboid je četvorougao sa dve dijagonale koje se preklapaju, a svi bridovi i preseci tačaka leže tačno na sfernoj površini,
- Tačke preseka i deljenja linija su uredno raspoređene i geometrijski precizno projektovane na površinu sfere.
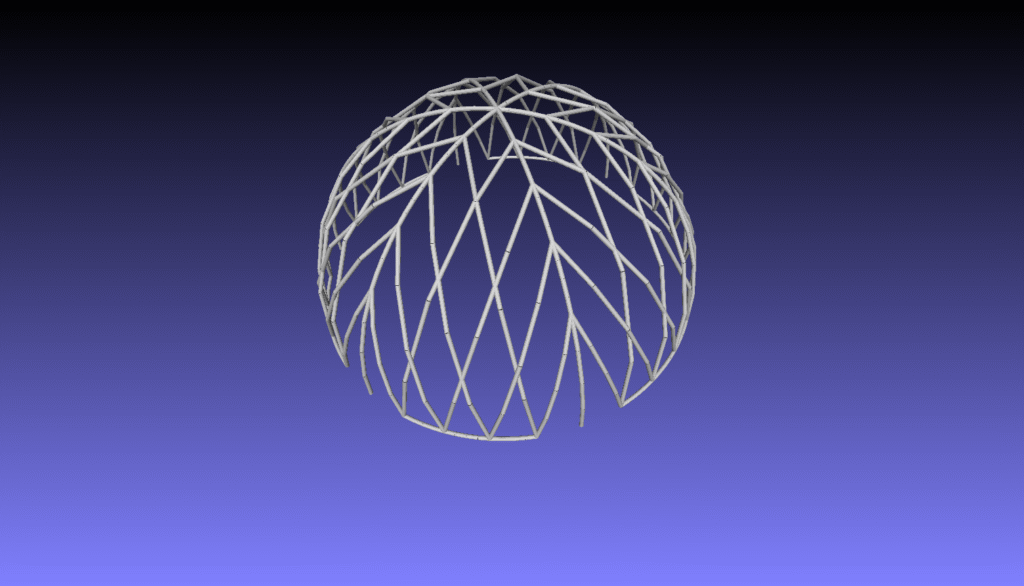
Takav tip konstrukcije omogućava relativno jednostavnu modularnost i proizvodnju elemenata koji se lako sastavljaju u prostor, a ujedno i dobar raspored napona i stabilnost zahvaljujući geometriji romboida.
Da li je neko već napravio ovakvu kupolu?
Da, koncept kupola podeljenih na romboidne ili slične fasetirane mreže nije nov i ima nekoliko poznatih varijanti u arhitekturi i matematici:
- Kupole fasetirane romboidima se često sreću u geometrijskim eksperimentima i dizajnu svetlih konstrukcija (pogotovo u modernim staklenim kupolama i krovovima), gde se koriste ravne plohe koje su lakše za proizvodnju i montažu.
- U okviru zomé sistema i polyhedral domes, postoje brojne varijante fasetiranja koje koriste romboide i paralelne četvorouglove za pokrivanje zakrivljenih površina.
- Buckminster Fuller i drugi su proučavali fasetirane kupole koje se sastoje od pravilnih četvorouglova i trouglova, gde romboidi mogu da budu sastavni delovi kompleksnijih mreža.
- Takođe, u modernim arhitektonskim i inženjerskim projektima postoji praksa pravljenja “diamond-shaped panel facades” koje liče na romboide na krivim površinama, često korišćene za estetski i funkcionalni efekat.
Međutim, tačna precizna implementacija koja je ovde definisana — podela sfere na sektore, sa brojem slojeva i tačaka koje daju tačno definisane romboide u ovoj tačnoj mreži — deluje kao specifična i korisna konstrukcija koja nije široko komercijalno poznata, ali svakako je bliska principima koje koriste arhitekte i inženjeri za modularne fasetirane kupole.
Prednosti ovakve kupole
- Modularnost: Može se proizvoditi od ponovljenih elemenata identične forme (rombodi), što pojednostavljuje proizvodnju.
- Laka montaža: Precizna mreža i čvorišta olakšavaju spajanje elemenata.
- Estetika: Rombasti oblik daje interesantan vizuelni efekat fasete sa igrom svetlosti i senki.
- Strukturna stabilnost: Rombasti oblici dobro raspoređuju opterećenja i omogućavaju stabilne, ali lagane konstrukcije.
Matematička osnova kupole od romboida na sferi
1. Jednačina sfere:
$$ x^2 + y^2 + z^2 = R^2 $$
2. Podešavanje sektora:
Broj sektora je \( N \), pa je ugao sektora:
$$ \theta = \frac{2 \pi}{N} $$
Za primer sa 6 sektora:
$$ \theta = \frac{2 \pi}{6} = \frac{\pi}{3} = 60^\circ $$
Sektor se prostire između uglova:
$$ \theta_0 = k \theta, \quad \theta_1 = (k+1) \theta, \quad k=0,1,\ldots,N-1 $$
3. Tačke na radijalnim linijama:
Na svakoj radijalnoj liniji se postavlja \( M \) tačaka jednako raspoređenih u intervalu \([0, R]\):
$$ r_i = \frac{i}{M-1} R, \quad i=0,1,\ldots,M-1 $$
Koordinate tačke na radijalnoj liniji pod uglom \( \theta_j \) su:
$$ \mathbf{p}_{i,j} = \left( r_i \cos \theta_j, \quad r_i \sin \theta_j, \quad z_i \right) $$
gde je vertikalna koordinata
$$ z_i = \sqrt{R^2 – r_i^2} $$
4. Tačke na kružnom luku:
Na kružnom luku između \( \theta_0 \) i \( \theta_1 \) postavlja se \( L \) tacaka bez krajnjih:
$$ \phi_k = \theta_0 + k \frac{\theta_1 – \theta_0}{L+1}, \quad k=1,2,\ldots,L $$
Tačke na kružnom luku su:
$$ \mathbf{q}_k = \left( R \cos \phi_k, \quad R \sin \phi_k, \quad 0 \right) $$
jer je na obodu \( r=R \) i visina \( z=0 \).
5. Projektovanje linija na površinu sfere:
Interpolacija između dve tačke \( \mathbf{P}_1 \) i \( \mathbf{P}_2 \) na sferi se vrsi:
$$ \mathbf{L}(t) = \frac{(1 – t)\mathbf{P}_1 + t \mathbf{P}_2}{\left\| (1 – t)\mathbf{P}_1 + t \mathbf{P}_2 \right\|} \cdot R, \quad t \in [0,1] $$
Time dobijamo tačke koje leže na površini sfere i prave “pravolinijsku” vezu projektovanu na sferu.
6. Struktura romboida:
Svaki romboid ima četiri temena:
$$ \mathbf{A} = \mathbf{p}_{i,j} \quad (\text{leva radijalna linija, sloj } i) $$
$$ \mathbf{B} = \mathbf{p}_{i+1,j} \quad (\text{leva radijalna linija, sloj } i+1) $$
$$ \mathbf{C} = \mathbf{q}_k \quad (\text{tacka na kruznom luku}) $$
$$ \mathbf{D} = \mathbf{p}_{i,j+1} \quad (\text{desna radijalna linija, sloj } i) $$
Program
Alat za generisanje prostorne mreže romboidne kupole sa eksportom u standardni OBJ model za 3D prikaz i dalje inženjerske obrade.
Instalacija potrebnih zavisnosti:
python3 -m pip install numpy
Programski kod za romboidna_kupola.py
#romboidna_kupola.py
# Instalacija potrebnih zavisnosti:python3 -m pip install numpy
import numpy as np
# Parametri kupole
num_radial_points = 6 # Tačke po radijalnoj liniji
num_arc_segments = 5 # Segmenata na kružnom luku
radius = 1.0 # Poluprečnik sfere
num_sectors = 6 # Sektora od po 60°
angle_deg = 60
angle_rad = np.radians(angle_deg)
num_subdivisions = 5 # Interpolacija tačaka po liniji
def project_to_sphere(point, radius):
vec = np.array(point)
norm = np.linalg.norm(vec)
if norm == 0:
return vec
return (vec / norm) * radius
def interpolate_points(p1, p2, n):
return [p1 + (p2 - p1) * t for t in np.linspace(0, 1, n)]
def polar_to_sphere(r, theta):
z = np.sqrt(radius**2 - r**2)
x = r * np.cos(theta)
y = r * np.sin(theta)
return np.array([x, y, z])
point_id = 1
used_points = {}
all_points = []
def add_point_3d(coord):
global point_id
key = tuple(np.round(coord, 6))
if key not in used_points:
used_points[key] = point_id
all_points.append(coord)
pid = point_id
point_id += 1
else:
pid = used_points[key]
return pid
# Generisanje tačaka po sektorima
sector_points = []
for sector in range(num_sectors):
theta0 = sector * angle_rad
theta1 = theta0 + angle_rad
left_points = []
for i in range(num_radial_points):
r = (i / (num_radial_points - 1)) * radius
coord = polar_to_sphere(r, theta0)
pid = add_point_3d(coord)
left_points.append((pid, coord))
right_points = []
for i in range(num_radial_points):
r = (i / (num_radial_points - 1)) * radius
coord = polar_to_sphere(r, theta1)
pid = add_point_3d(coord)
right_points.append((pid, coord))
arc_points = []
arc_angles = np.linspace(theta0, theta1, num_arc_segments + 1)
for theta in arc_angles[1:-1]:
r = radius
coord = polar_to_sphere(r, theta)
pid = add_point_3d(coord)
arc_points.append((pid, coord))
sector_points.append({
'left': left_points,
'right': right_points,
'arc': arc_points
})
# Funkcija za kreiranje linija sa interpolacijom i projekcijom na sferu
def create_lines(p1, p2):
interp = interpolate_points(p1, p2, num_subdivisions)
proj = [project_to_sphere(pt, radius) for pt in interp]
# Mapiranje interpoliranih tačaka na njihove ID-eve
ids = [add_point_3d(pt) for pt in proj]
# Kreiraj bridove između susednih interpoliranih tačaka
edges = [(ids[i], ids[i+1]) for i in range(len(ids)-1)]
return edges
# Prikupljanje svih bridova
all_edges = []
for sector in sector_points:
left = sector['left']
right = sector['right']
arc = sector['arc']
# Radijalne linije
for i in range(num_radial_points -1):
edges = create_lines(left[i][1], left[i+1][1])
all_edges.extend(edges)
edges = create_lines(right[i][1], right[i+1][1])
all_edges.extend(edges)
# Kružni lukovi
for i in range(len(arc) - 1):
edges = create_lines(arc[i][1], arc[i+1][1])
all_edges.extend(edges)
# Linije koje dele romboide (crtane linije)
connections = [
(left[1], arc[3]),
(left[2], arc[2]),
(left[3], arc[1]),
(left[4], arc[0]),
(right[1], arc[0]),
(right[2], arc[1]),
(right[3], arc[2]),
(right[4], arc[3]),
]
for (a, b) in connections:
edges = create_lines(a[1], b[1])
all_edges.extend(edges)
# Izbaci duplikate bridova (nebitan redosled, brid [a,b] isti kao [b,a])
unique_edges = set()
for e1, e2 in all_edges:
if e1 < e2:
unique_edges.add((e1, e2))
else:
unique_edges.add((e2, e1))
# Snimanje u OBJ fajl
filename = "kupola_rhomboids_wireframe.obj"
with open(filename, 'w') as f:
# Upis vrhova
for v in all_points:
f.write(f"v {v[0]:.6f} {v[1]:.6f} {v[2]:.6f}\n")
# Upis bridova (linija)
for (v1, v2) in unique_edges:
f.write(f"l {v1} {v2}\n")
print(f"Model je snimljen u '{filename}' sa {len(all_points)} tačaka i {len(unique_edges)} bridova.")
Program sipke.py učitava trodimenzionalni žičani model sferne kupole iz OBJ fajla i generiše ekvivalentni 3D PLY model u kojem su linije zamenjene trodimenzionalnim cilindričnim šipkama definisane debljinom i orijentacijom.
Instalacija potrebnih zavisnosti:
python3 -m pip install numpy
Programski kod za sipke.py
#sipke.py
# Instalacija potrebnih zavisnosti:python3 -m pip install numpy
import numpy as np
from pathlib import Path
# Debljina šipki
RADIUS = 0.01
# Broj segmenata oko cilindra (glatkoća)
CYLINDER_SEGMENTS = 16
# Ulazni i izlazni fajlovi
INPUT_OBJ = "kupola_rhomboids_wireframe.obj"
OUTPUT_PLY = "kupola_romboidi.ply"
def ucitaj_obj(path):
vertices = []
edges = []
with open(path, "r") as f:
for line in f:
if line.startswith("v "):
_, x, y, z = line.strip().split()
vertices.append(np.array([float(x), float(y), float(z)]))
elif line.startswith("l "):
parts = line.strip().split()
edges.append((int(parts[1]) - 1, int(parts[2]) - 1))
return vertices, edges
def napravi_cilindar(p1, p2, radius, segments=16):
"""
Kreira mesh cilindar između dve tačke p1 i p2 sa zadatim radijusom.
Vraća tuple (vertices, faces) za cilindar.
"""
# Vektor i dužina šipke
v = p2 - p1
length = np.linalg.norm(v)
if length < 1e-8:
return [], []
# Osnovni vektor osovine
axis = v / length
# Pronađi ortogonalni vektor (neparalelan)
if abs(axis[0]) < 0.001 and abs(axis[1]) < 0.001:
ortho = np.array([1, 0, 0])
else:
ortho = np.array([0, 0, 1])
# Prava normalizovana baza vektora za cilindar (dve ose ortogonalne na axis)
n1 = np.cross(axis, ortho)
n1 /= np.linalg.norm(n1)
n2 = np.cross(axis, n1)
n2 /= np.linalg.norm(n2)
# Kreiraj kružne preseke na p1 i p2
circle_p1 = []
circle_p2 = []
for i in range(segments):
theta = 2 * np.pi * i / segments
dir_vec = np.cos(theta) * n1 + np.sin(theta) * n2
circle_p1.append(p1 + radius * dir_vec)
circle_p2.append(p2 + radius * dir_vec)
# Kreiraj vertekse i face
vertices = circle_p1 + circle_p2
faces = []
# Spoji segmente u trouglove
for i in range(segments):
i_next = (i + 1) % segments
# Trougao 1
faces.append((i, i_next, i_next + segments))
# Trougao 2
faces.append((i, i_next + segments, i + segments))
return vertices, faces
def sacuvaj_ply(verts, faces, filename):
with open(filename, "w") as f:
f.write("ply\n")
f.write("format ascii 1.0\n")
f.write(f"element vertex {len(verts)}\n")
f.write("property float x\nproperty float y\nproperty float z\n")
f.write(f"element face {len(faces)}\n")
f.write("property list uchar int vertex_indices\n")
f.write("end_header\n")
for v in verts:
f.write(f"{v[0]} {v[1]} {v[2]}\n")
for face in faces:
f.write(f"3 {face[0]} {face[1]} {face[2]}\n")
def main():
path_obj = Path(INPUT_OBJ)
if not path_obj.exists():
print(f"Ne postoji fajl: {INPUT_OBJ}")
return
vertices, edges = ucitaj_obj(INPUT_OBJ)
print(f"Učitano {len(vertices)} tačaka i {len(edges)} ivica iz {INPUT_OBJ}")
sve_verteksi = []
sve_face = []
offset = 0
for i1, i2 in edges:
p1 = vertices[i1]
p2 = vertices[i2]
verts_cil, faces_cil = napravi_cilindar(p1, p2, RADIUS, CYLINDER_SEGMENTS)
# Dodaj vertikse sa pomeranjem offseta
sve_verteksi.extend(verts_cil)
for f in faces_cil:
sve_face.append((f[0] + offset, f[1] + offset, f[2] + offset))
offset += len(verts_cil)
sacuvaj_ply(sve_verteksi, sve_face, OUTPUT_PLY)
print(f"Ply fajl sa šipkama sačuvan kao: {OUTPUT_PLY}")
if __name__ == "__main__":
main()
Reference
Knjige i priručnici
- Geodesic Domes: Demonstrated and explained with cut-out models (Borin van Loon, 1999)
Praktičan vodič kroz dizajn i konstrukciju geodetskih kupola, uključujući fasetiranje sfera pravilnim deljenjem površine https://www.amazon.com/Geodesic-Domes-Borin-Van-Loon/dp/0906212928 - Domebook 1 & 2 (Pacific Domes, 1971)
Priručnici s detaljima o kružnim i višefrekvencijskim kupolama, podelama sfere i izgradnji modela https://dahp.wa.gov/sites/default/files/Domebook_2_1971smaller.pdf
Akademski i istraživački radovi
- „SIMPLIFIED CONSTRUCTION OF DOMES AND SPHERES…“ – Ernest Rogers (2020)
Opisane metode podela sfere na pravougle ili romboidalne segmente, sa praktičnim primerima i primenom u arhitekturi https://www.researchgate.net/publication/342504419_SIMPLIFIED_CONSTRUCTION_OF_DOMES_AND_SPHERES_An_Architectural_Solution_to_Global_Warming_for_Homes_and_Public_Buildings - „Deployable dome based on the adjusted rhombic triacontahedron…“
Istraživački rad o sklopivim kupolama koje koriste romboidne panelne jedinice (SLE – scissor-like element) https://www.researchgate.net/figure/Deployable-dome-based-on-the-adjusted-rhombic-triacontahedron-from-a-fully-closed-to-an_fig12_271423185
Patenti i tehnike
- US20070163185A1 – Geodesic Rhombic Triacontahedron Construction Methods
Patent o sistemima za izradu kupola pomoću geometrije romboidne triakontaedre – definisanje simetričnih mreža na sferi
https://patents.google.com/patent/US20070163185A1/en - US3203144A – Laminar geodesic dome
Rani patent (1965) koji opisuje sferne strukture fasetirane dijamantskim (romboidnim) panelima za poboljšanje čvrstoće https://patents.google.com/patent/US3203144A/en
Web resursi i arhitektonski primeri
- Rhombiyurt (Zintaglio Arts)
Projekt baziran na rombic triacontaedru, sklopiva „jurta“ napravljena od romboidnih panela korišćena na događajima kao što je Burning Man https://www.zintaglio.com/rhombiyurt.html - Lamella (structure)
Lamela–stil krovnih konstrukcija koristi mrežu preloma u romboidnom uzorku na zakrivljenim površinama . - Muqarnas
Islamska arhitektonska dekoracija koristi geometrijske plohe slične romboidima u kupolama, naročito u prelazu s kvadrata na kružnicu