make_dome_clip_yrotate.py je Python skript namenjen za generisanje 3V geodetske kupole, njenu rotaciju i sečenje, i na kraju izvoz u više CAD i 3D formata. Posebno je prilagođen za slučaj gde se dužine letvica A, B i C unapred dobijaju iz drugog programa, geosf.py koji sračunava dužinu, broj letvica i broj potrebnih konektora za izgradnju Geodetske kupole pa se kupola konstruiše na osnovu tih realnih vrednosti.
Osnovne funkcije programa
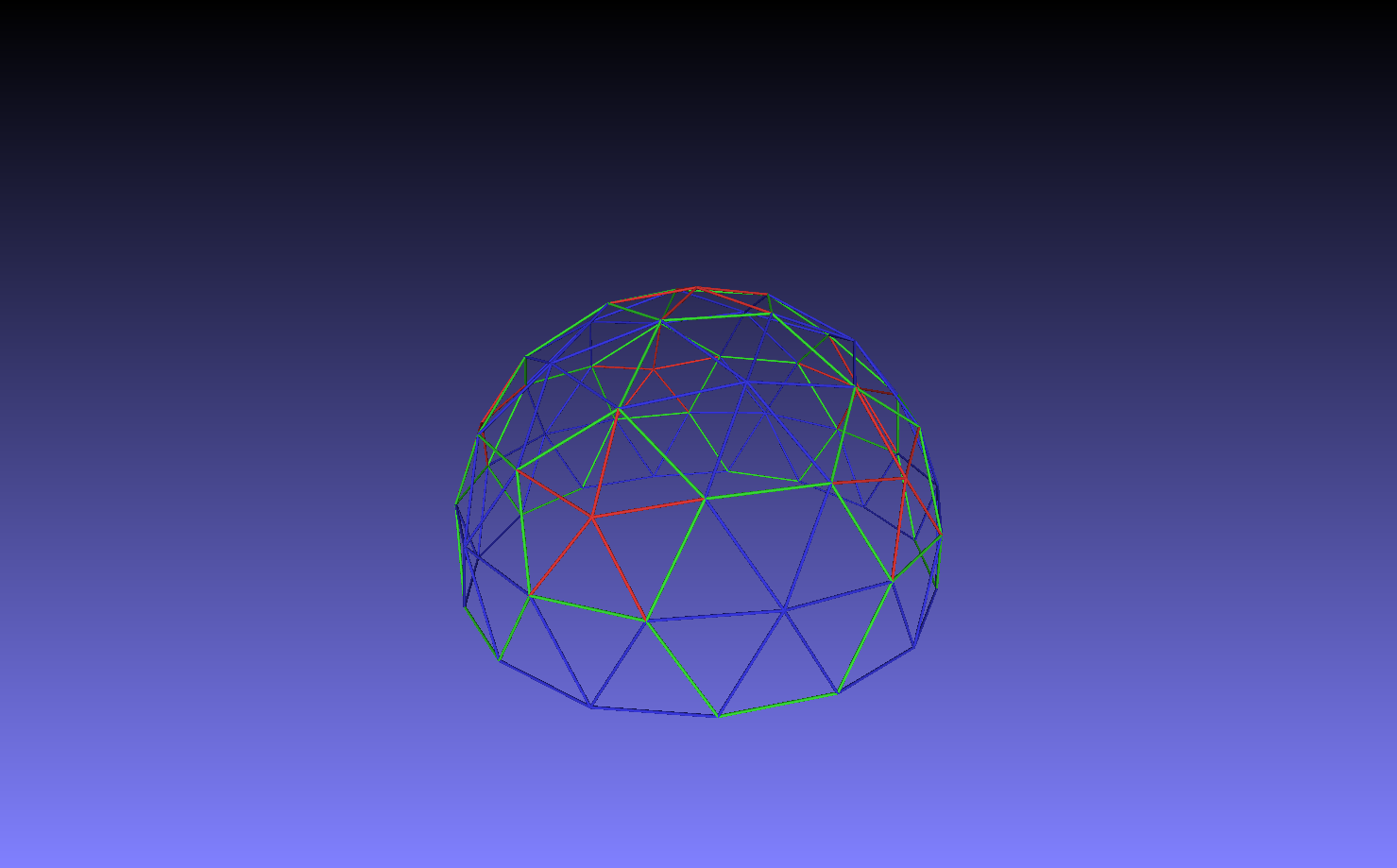
- Generisanje geodetske strukture
- Polazna figura je ikosaedar (20 jednakostraničnih trouglova).
- Svaka stranica se deli na manje delove (frekvencija freq=3, tj. 3V), a zatim se svi dobijeni čvorovi projektuju na sferu poluprečnika R=500 cm.
- Na taj način se dobija mreža geodetske kupole sa različitim tipovima ivica.
- Rotacija kupole
- Ceo sistem čvorova se rotira oko Y ose za 58.2825°.
- Ova rotacija nije proizvoljna – ona omogućava da kupola nakon presecanja dobije željeni oblik i proporcije.
- Odsecanje kupole
- Nakon rotacije, primenjuje se sečenje ravni z = z_clip.
- Visina presecanja zavisi od parametra
CLIP_MODE:"3/8"– odsecanje na 1/4 radijusa iznad centra."5/8"– odsecanje na 1/4 radijusa ispod centra."manual"– korisnik ručno unosi visinu presecanja.
- Time se dobija samo gornji deo kupole, kao što je slučaj kod kupola koje se u praksi oslanjaju na horizontalnu osnovu.
- Dužine letvica i klasifikacija
- Svaka ivica se meri i poredi sa unapred datim vrednostima:
- A = 174.31 cm
- B = 201.78 cm
- C = 206.21 cm
- Program svaku ivicu svrstava u tip A, B ili C, u skladu sa najbližom dužinom.
- Na kraju se ispisuje broj elemenata po tipovima, što omogućava proveru da li se dobijaju očekivane količine (30 A, 40 B, 50 C).
- Svaka ivica se meri i poredi sa unapred datim vrednostima:
- Modelovanje strutova (letvica)
- Svaka ivica se modeluje kao cilindar određenog radijusa (2.5 cm).
- Cilindri se generišu pomoću biblioteke trimesh, i seku se na ravni
z_clipkako bi samo deo iznad preseka ostao u modelu.
- Izvoz u formate
Program rezultate snima u tri formata:- PLY (
dome_clipped_y_colored.ply) – sa bojama po tipu letvica (A=crvena, B=zelena, C=plava). - STL (
dome_clipped_y_combined.stl) – kombinovani 3D model spreman za štampu ili dalju obradu. - DXF (
dome_clipped_y_centerlines.dxf) – nacrt sa centar-linijama svake letvice, grupisanim u slojeve po tipovima (A/B/C) i obojenim prema standardnim CAD bojama.
- PLY (
Tehnički detalji
- Ulazni parametri:
- poluprečnik kupole (R),
- frekvencija subdivizije (freq),
- dužine letvica (iz geosf.py programa),
- način presecanja (CLIP_MODE).
- Izlazni fajlovi:
- PLY sa bojama,
- STL za 3D modeliranje i štampu,
- DXF za tehničku dokumentaciju i proizvodnju.
- Jedinice: svi proračuni i fajlovi su u centimetrima.
Primena
Ovaj program je koristan u:
- projektovanju geodetskih kupola za arhitektonske i inženjerske svrhe,
- pripremi dokumentacije za izradu konstrukcije od letvica,
- analizi količina materijala i tipova letvica,
- izvozu podataka u 3D i CAD programe (npr. AutoCAD, Blender, Rhino).
📌 Ukratko: make_dome_clip_yrotate.py je specijalizovan alat za projektovanje 3V geodetskih kupola, koji omogućava realističan proračun dužina letvica, njihovu klasifikaciju, sečenje kupole i izvoz u standardne tehničke formate.
instalacija potrebnih zavisnosti:
python3 -m pip install numpy trimesh ezdxf
Programski kod za make_dome_clip_yrotate.py:
#make_dome_clip_yrotate.py
# The MIT License (MIT)
# Copyright (c) 2025 Aleksandar Maričić
#
# Ovim se omogućava bilo kome da koristi, kopira, menja, spaja, objavljuje,
# distribuira, daje podlicencu i/ili prodaje kopije ovog softverskog programa,
# uz uslov da u svim kopijama ili značajnim delovima softverskog programa bude
# uključena sledeća obavest:
#
# Copyright (c) 2025 Aleksandar Maričić
#
# Ovaj softverski program je pružen "takav kakav jeste", bez bilo kakvih garancija,
# izričitih ili impliciranih, uključujući, ali ne ograničavajući se na, garancije o
# prikladnosti za prodaju ili pogodnosti za određenu svrhu. U svakom slučaju, autori
# ili nosioci prava nisu odgovorni za bilo kakvu štetu ili druge obaveze koje mogu nastati
# usled upotrebe ovog softverskog programa.
#!/usr/bin/env python3
"""
make_dome_clip_yrotate.py
Generiše 3V geodetsku kupolu (freq=3), rotira oko Y ose za 58.2825°,
odseca sve ispod ravni z=Z_CLIP_HEIGHT (posle rotacije).
Snima PLY (boje po tipu A/B/C), STL i DXF (centerlines).
Jedinice: cm
"""
import numpy as np
import math
import trimesh
import ezdxf
from collections import Counter
# ---------- PODESAVANJA ----------
R = 500.0 # poluprečnik u cm
freq = 3 # 3V
strut_radius = 2.5 # cm - poluprečnik cilindra
cylinder_sections = 20
ROT_Y_DEG = 58.2825 # stepeni rotacije oko Y ose
GIVEN = {'A': 174.31, 'B': 201.78, 'C': 206.21}
EXPECTED_COUNTS = {'A': 30, 'B': 40, 'C': 50}
OUT_PLY = "dome_clipped_y_colored.ply"
OUT_STL = "dome_clipped_y_combined.stl"
OUT_DXF = "dome_clipped_y_centerlines.dxf"
Z_TOL = 1e-8 # tolerancija pri sečenju
# --- kontrola presecanja ---
CLIP_MODE = "5/8" # "3/8", "5/8", "manual"
Z_CLIP_HEIGHT_MANUAL = 0.1
# ---------------------------------
def compute_z_clip(R, mode, manual_value):
if mode == "3/8":
return R/4.0
elif mode == "5/8":
return -R/4.0
elif mode == "manual":
return manual_value
else:
raise ValueError(f"Nepoznat CLIP_MODE: {mode}")
# ----- generisanje icosahedra -----
def make_icosahedron_unit():
phi = (1.0 + 5.0**0.5) / 2.0
V = np.array([
(-1, phi, 0),( 1, phi, 0),(-1, -phi, 0),( 1, -phi, 0),
( 0, -1, phi),( 0, 1, phi),( 0, -1, -phi),( 0, 1, -phi),
( phi, 0, -1),( phi, 0, 1),(-phi, 0, -1),(-phi, 0, 1)
], dtype=float)
V = V / np.linalg.norm(V, axis=1)[:,None]
F = np.array([
(0,11,5),(0,5,1),(0,1,7),(0,7,10),(0,10,11),
(1,5,9),(5,11,4),(11,10,2),(10,7,6),(7,1,8),
(3,9,4),(3,4,2),(3,2,6),(3,6,8),(3,8,9),
(4,9,5),(2,4,11),(6,2,10),(8,6,7),(9,8,1)
])
return V, F
def subdivide_and_project(V, F, freq, R):
pts = []
faces = []
pt_map = {}
def key_of(p):
return (round(float(p[0]),8), round(float(p[1]),8), round(float(p[2]),8))
for tri in F:
v0, v1, v2 = V[list(tri)]
local_idx = {}
for i in range(freq+1):
for j in range(freq+1-i):
k = freq - i - j
p = (i * v0 + j * v1 + k * v2) / freq
p = p / np.linalg.norm(p) * R
key = key_of(p)
if key not in pt_map:
pt_map[key] = len(pts)
pts.append(p)
local_idx[(i,j)] = pt_map[key]
for i in range(freq):
for j in range(freq - i):
a = local_idx[(i,j)]
b = local_idx[(i+1,j)]
c = local_idx[(i,j+1)]
faces.append((a,b,c))
if j + i + 1 < freq:
d = local_idx[(i+1,j+1)]
faces.append((b,d,c))
return np.array(pts), np.array(faces)
def build_edges(faces):
edges = {}
for (a,b,c) in faces:
for u,v in ((a,b),(b,c),(c,a)):
e = tuple(sorted((int(u),int(v))))
edges[e] = edges.get(e, 0) + 1
return list(edges.keys())
def edge_length(pts, e):
u,v = e
return np.linalg.norm(pts[u]-pts[v])
def nearest_label(length, given):
best = None
bestd = 1e9
for label,val in given.items():
d = abs(length - val)
if d < bestd:
bestd = d; best = label
return best
def rotation_matrix_y(deg):
th = math.radians(deg)
c = math.cos(th); s = math.sin(th)
Rm = np.array([[c,0,s],[0,1,0],[-s,0,c]], dtype=float)
return Rm
def cylinder_between_clipped(p0, p1, radius, sections, z_clip):
height = np.linalg.norm(p1 - p0)
if height <= 1e-9:
return None
cyl = trimesh.creation.cylinder(radius=radius, height=height, sections=sections)
mid = (p0 + p1) / 2.0
direction = (p1 - p0) / height
z = np.array([0.0, 0.0, 1.0])
v = np.cross(z, direction)
c = np.dot(z, direction)
if np.linalg.norm(v) < 1e-8 and c > 0.999999:
Rm = np.eye(3)
elif np.linalg.norm(v) < 1e-8 and c < -0.999999:
Rm = trimesh.transformations.rotation_matrix(math.pi, [1,0,0])[:3,:3]
else:
s = np.linalg.norm(v)
kmat = np.array([[0,-v[2],v[1]],[v[2],0,-v[0]],[-v[1],v[0],0]])
Rm = np.eye(3) + kmat + (kmat @ kmat) * ((1 - c) / (s**2))
transform = np.eye(4)
transform[:3,:3] = Rm
transform[:3,3] = mid
cyl.apply_transform(transform)
centroids = cyl.triangles_center
mask = centroids[:,2] >= z_clip - Z_TOL
if not mask.any():
return None
faces_idx = np.nonzero(mask)[0]
faces = cyl.faces[faces_idx]
unique_vid, inverse = np.unique(faces.flatten(), return_inverse=True)
new_verts = cyl.vertices[unique_vid]
new_faces = inverse.reshape((-1,3))
new_mesh = trimesh.Trimesh(vertices=new_verts, faces=new_faces, process=False)
return new_mesh
# ---- popravljena funkcija ----
def clip_segment_to_plane(p0, p1, z_clip=0.0):
"""Ispravno odseca segment na ravni z=z_clip"""
z0 = p0[2]; z1 = p1[2]
if z0 >= z_clip - Z_TOL and z1 >= z_clip - Z_TOL:
return (p0, p1) # oba iznad
if z0 < z_clip - Z_TOL and z1 < z_clip - Z_TOL:
return None # oba ispod
# presecanje
t = (z_clip - z0) / (z1 - z0 + 1e-16)
t = np.clip(t, 0.0, 1.0)
p_int = p0 + t * (p1 - p0)
if z0 >= z_clip - Z_TOL:
return (p0, p_int) # gornja tačka do preseka
else:
return (p_int, p1) # presečna tačka do gornje
# ---------------------------------
def main():
print("Generišem icosahedron i subdividujem (freq = {})...".format(freq))
V, F = make_icosahedron_unit()
pts, faces = subdivide_and_project(V, F, freq, R)
Ry = rotation_matrix_y(ROT_Y_DEG)
pts_rot = (pts @ Ry.T)
z_clip = compute_z_clip(R, CLIP_MODE, Z_CLIP_HEIGHT_MANUAL)
print(f"Rotacija oko Y za {ROT_Y_DEG:.6f}°, CLIP_MODE={CLIP_MODE}, z_clip={z_clip:.2f} cm")
edges = build_edges(faces)
edge_labels = {}
for e in edges:
L = edge_length(pts_rot, e)
edge_labels[e] = nearest_label(L, GIVEN)
cnt = Counter(edge_labels[e] for e in edge_labels)
print("Broj po tipovima (pre clip-a):", cnt)
colors_rgb = {'A':[200,50,50], 'B':[50,200,50], 'C':[50,50,200]}
dxf_colors = {'A':1, 'B':3, 'C':5} # 1=red,3=green,5=blue
cylinders = []
cyl_colors = []
centerlines = []
for i, e in enumerate(edge_labels):
u,v = e
p0 = pts_rot[u]
p1 = pts_rot[v]
lab = edge_labels[e]
cyl_piece = cylinder_between_clipped(p0, p1, strut_radius, cylinder_sections, z_clip)
if cyl_piece is not None:
cylinders.append(cyl_piece)
cyl_colors.append(colors_rgb.get(lab, [150,150,150]))
seg = clip_segment_to_plane(p0, p1, z_clip=z_clip)
if seg is not None:
centerlines.append((seg[0], seg[1], lab))
if not cylinders:
print("Nema cilindara iznad z_clip.")
return
combined = trimesh.util.concatenate(cylinders)
vert_offset = 0
verts_list = []
faces_list = []
colors_list = []
for idx, cyl in enumerate(cylinders):
nv = len(cyl.vertices)
faces_list.append(cyl.faces + vert_offset)
verts_list.append(cyl.vertices)
color4 = np.tile(np.array(cyl_colors[idx] + [255], dtype=np.uint8), (nv,1))
colors_list.append(color4)
vert_offset += nv
all_verts = np.vstack(verts_list)
all_faces = np.vstack(faces_list)
all_colors = np.vstack(colors_list)
mesh_with_color = trimesh.Trimesh(vertices=all_verts, faces=all_faces, process=False)
mesh_with_color.visual.vertex_colors = all_colors
mesh_with_color.export(OUT_PLY)
combined.export(OUT_STL)
# --- DXF export sa bojama po tipu ---
doc = ezdxf.new(dxfversion='R2010')
msp = doc.modelspace()
for (p0,p1,lab) in centerlines:
if lab not in doc.layers:
doc.layers.new(name=lab, dxfattribs={'color': dxf_colors.get(lab, 7)})
msp.add_line(tuple(p0.tolist()), tuple(p1.tolist()), dxfattribs={'layer': lab})
doc.saveas(OUT_DXF)
print("Gotovo. Sačuvano:", OUT_PLY, OUT_STL, OUT_DXF)
if __name__ == "__main__":
main()